总览
当前项目github仓库:https://github.com/LunarStore/onvif_srvd。
onvif服务原参考项目:https://github.com/KoynovStas/onvif_srvd/tree/master,原项目当中,作者把服务发现和onvif服务分成了两个项目。我已经将这两项目合并,onvif_srvd包含服务发现与onvif服务。onvif_srvd实现了Onvif所需的最少接口。(注意:甚至连Profile S标准都未达到,并且为了适配H265,引入了media2.wsdl,按规范来讲我们需要完整的实现Profile T标准)
调试工具:ODM + OnvifTestTool。
Onvif Device Test Tool工具能高效帮忙对onvif服务进行调试,可以利用Onvif Device Test Tool查看和分析 来自onvif服务的gsoap报文。如果你需要开发onvif,该工具一定要学会使用!!!它一定能是你调试onvif的利器。
onvif服务项目结构:
1 | ipcamera/app/onvif_srvd |
- SDK: 包含gsoap-2.8.zip文件。
- cmake: cmake模块。
- CMakeLists.txt: cmake构建脚本。
- gsoap-2.8: gsoap-2.8.zip解压后的项目。但不完全是gsoap-2.8.zip解压后的项目,根据实际情况对少数文件进行过修改(不然编译不通过!),onvif_srvd的构建依赖该项目。
- lib: 依赖库。
- src: onvif源码所在目录。
- start_scripts: 启动脚本。暂未使用。
- wsdl: onvif服务接口的描述文件。gsoap会利用它来生成接口代码。
移植与调试
这里准备了一份ipc项目当中onvif_srv服务的X86版本。方便以后onvif服务的扩展与移植
编译命令如下:
1 | cmake -B build . -DWSSE_ON=1 -DUSE_GSOAP_STATIC_LIB=1 |
编译成功如下:
编译成功后,build/generated目录会生成如下代码:
1 | onvif_srvd/build/generated |
和onvif_srvd/src当中的代码对比,如下:
1 | onvif_srvd/src |
onvif_srvd/src下源文件和onvif_srvd/build/generated下源文件的关系:
- daemon: 守护进程的实现。
- eth_dev_param: 网口配置工具文件。
- onvif_srvd: main函数所在文件。
- service_context: onvif服务配置管理实现文件,管理包括码流等信息。
- service_device: wsdl 设备管理服务接口实现文件,对build/generated目录下的soapDeviceBindingService接口进行实现。
- service_media1: wsdl media1服务接口实现文件,对build/generated目录下的soapMediaBindingService接口进行实现。仅支持jpeg、mpeg4、h264。
- service_media2: wsdl media2服务接口实现文件,对build/generated目录下的soapMedia2BindingService接口进行实现。包含service_media1所支持的格式,此外增加了对h265的支持。
- service_PTZ: wsdl PTZ控制服务接口实现文件,对build/generated目录下的soapPTZBindingService接口进行实现。我们的项目当中目前没实现PTZ云台功能,所以,该服务可以暂时忽略,只是因为原项目当中存在,所以我就保留下来了。
- service_WSDD: 对wsdl WSDD服务接口进行实现,是我们项目当前服务发现所采用的方式。如果需要修改服务发现实现相关代码,主要修改该文件。
- smacros: 通用宏,定义了包括日志的实现。
- soapClient: 该文件由gsoap生成。无需深入了解。
- utils: 工具文件。
编译完成后,将你的PC以太网和笔记本相连。然后给以太网设置一个ip,我这里设置的是:192.168.1.77。子网掩码设置成255.255.255.0。如下:

编译完成后,在onvif项目的build目录下,会生成 onvif_srvd 这样一个可执行文件。前面的工作准备好后,我们可以使用如下命令来启动我们的服务。
1 | # --no_fork : 不启用子线程。 |
正常启动后会输出类似如下日志:
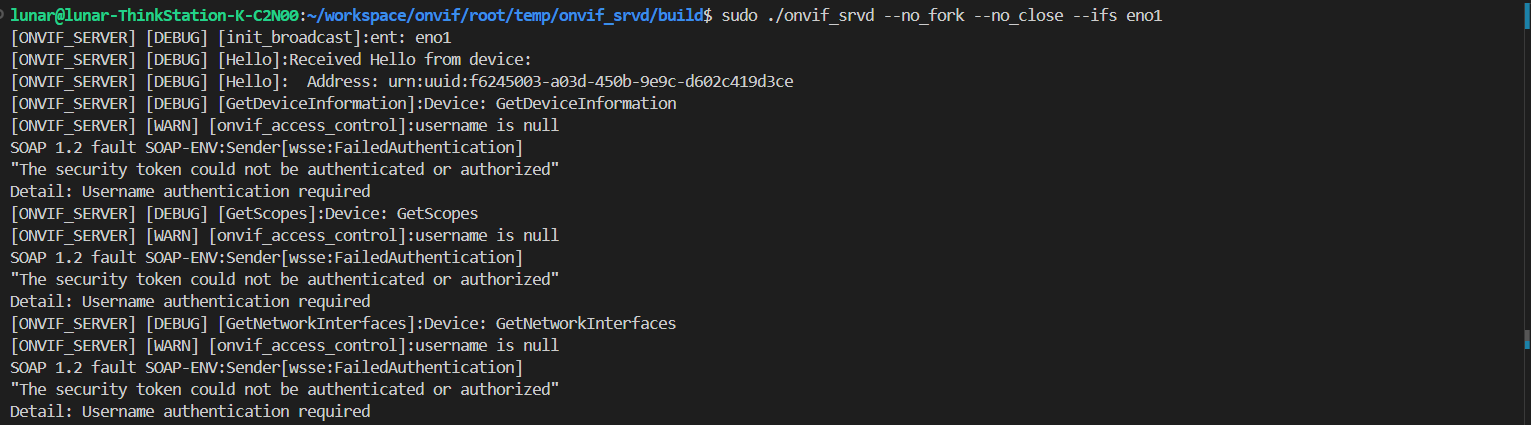
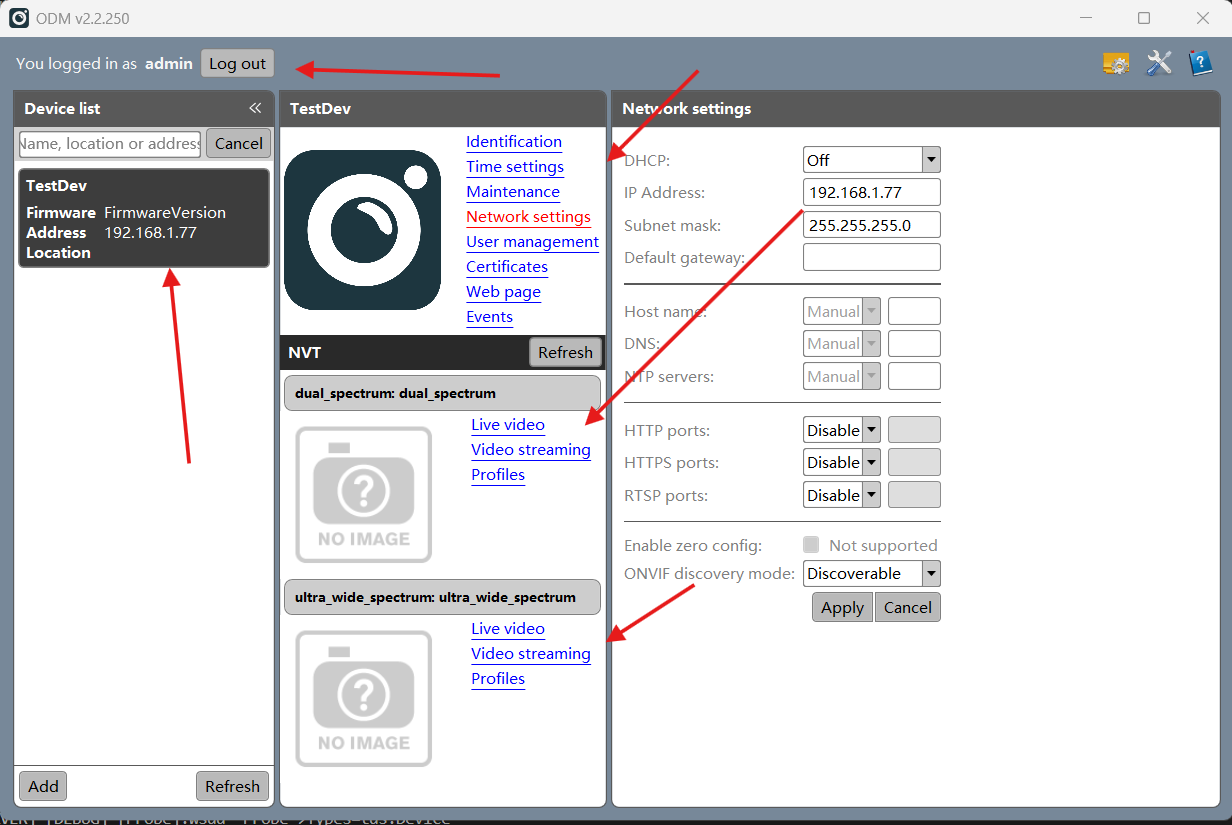
然后打开笔记本上安装的ODM,在左上角输入用户名和密码:
- 用户名:admin
- 密码:*** (密码是在代码当中写死的!,参考:onvif_srvd\src\utils.cpp: onvif_access_control函数。
登录后,可以看到虚拟相机的信息,包括虚拟相机设备地址、设备基本信息、码流信息等。当点击Live video时会出现没有信号的提示,这是正常现象,因为我们onvif当中设置的码流url是测试使用实际上并不存在,因为我们的pc机没有提供这样的码流。
Onvif服务请求链路流程介绍(搭配海康录像机)
onvif服务逻辑链路如下:
首先,相机网口和录像机使用网线直连,录像机和相机上电。录像机连接显示器,然后输入录像机用户名和密码。为方便,我们相机的onvif服务密码和录像机密码是一致的。在点击录像机的配置,然后点击在线设备列表的刷新,上面就会出现两路我们相机的码流。
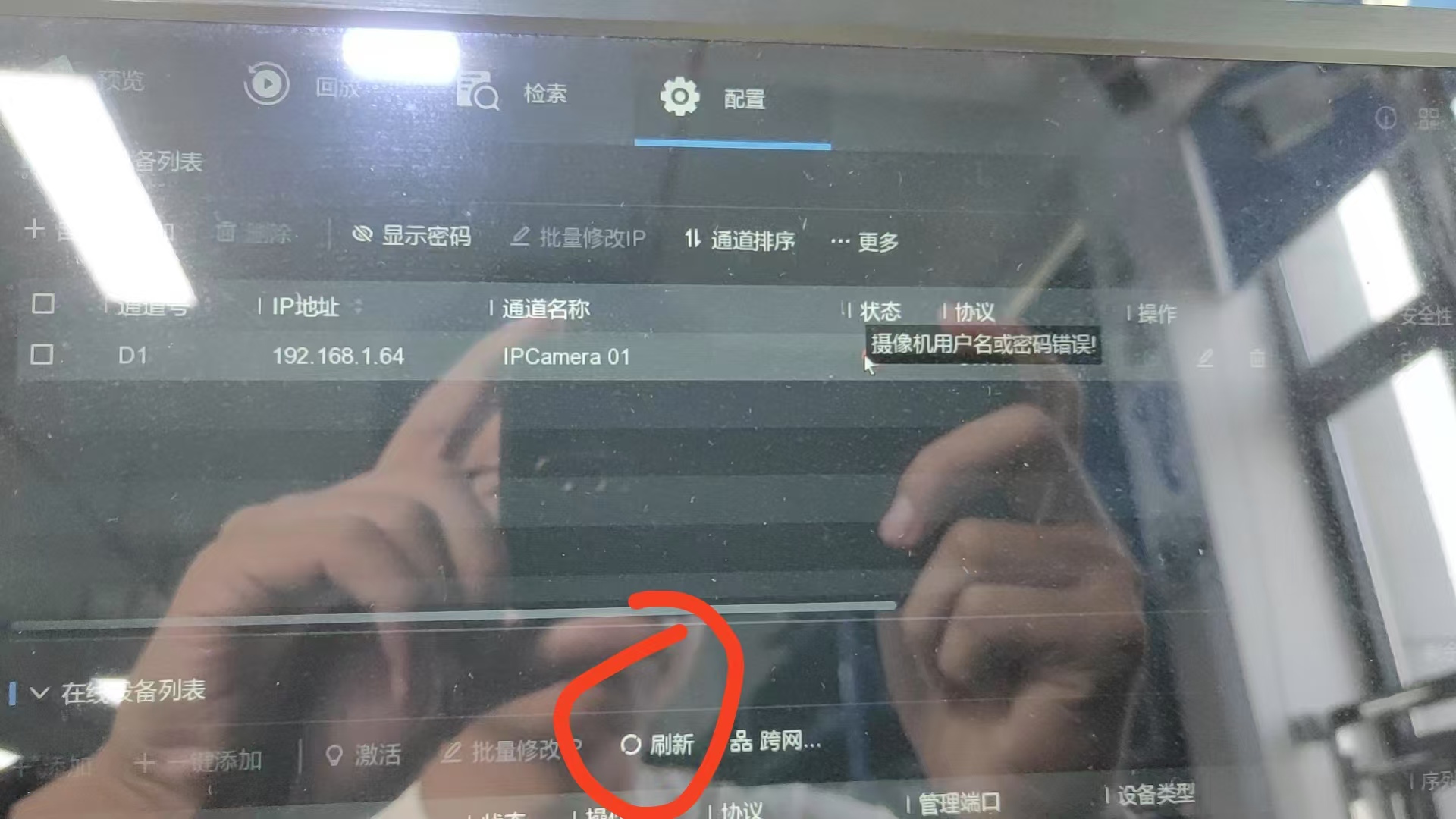
正常情况下,双击两路被发现的码流,在预览界面,录像机会预览显示我们相机的超宽光谱和双光谱码流。
报文交互逻辑是:
- 录像机向网口发送服务发现的广播报文。
- 录像机的onvif_srvd服务当中的Service Discover接收到录像机发来的服务发现soap报文,Service Discover会将onvif服务的url发送给录像机。
- 录像机收到相机onvif服务的url,拿着onvif服务的url再向onvif服务发送服务查询soap报文(请求onvifDeviceBindingService::GetServices接口)。
- onvif服务会返回所支持服务列表(Device Server、Media Service、Media2 Service、PTZ Service)。
- 经过一次次交涉,录像机最终会请求MediaBindingService::GetStreamUri接口,获取设备支持的所有RTSP码流URL。然后一一拉流预览显示。
Onvif服务添加一个WSDL
WSDL下载网站:https://www.onvif.org/profiles/specifications/
- 将下载下来的wsdl放到ipcamera/app/onvif_srvd/wsdl。
- 如果下载下来的wsdl当中的内容,有引用onvif.xsd、b-2.xsd、bf-2.xsd、common.xsd、t-1.xsd,需要将依赖路径修改成./xxx.xsd。
- 在CMakeLists.txt当中添加gsoap编译生成的代码文件。形如:
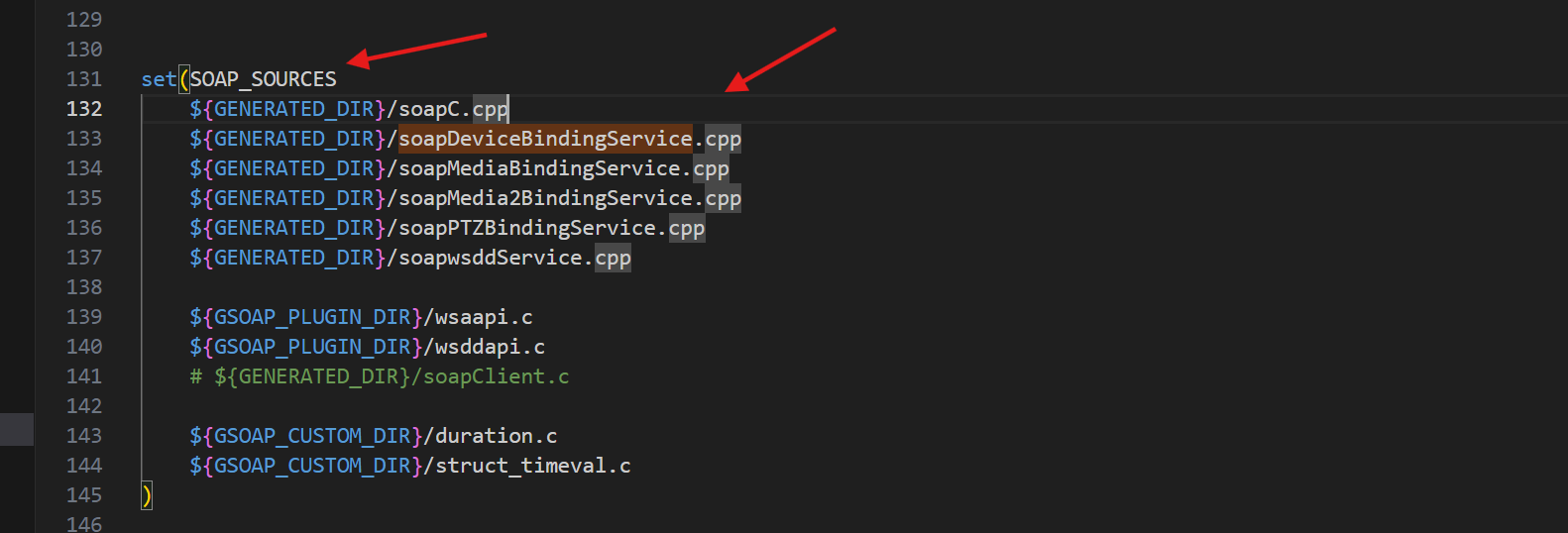
当然如果你不知道你将添加的wsdl将生成什么文件名,你可以先将wsdl移植到x86版本的onvif_srvd当中。待cmake完成后,查看build/generated目录所生成的文件名。然后按照soapDeviceBindingService(对应devicemgmt.wsdl生成的源文件)在CMakeLists.txt当中照猫画虎添加对应的.cpp和.h文件即可。 - 参考soapDeviceBindingService的接口实现文件,给新添加的wsdl在onvif_srvd/src当中增加接口实现文件。当然,也别忘了将接口实现文件添加到CMakeLists.txt当中去。
Onvif服务接口实现
接口实现参考的辅助网站:https://www.onvif.org/onvif/ver20/util/operationIndex.html
假设我们现在需要添加系统重启的接口(SystemReboot):
- 从上面网站当中我们可以得知,我们需要修改设备管理的实现接口文件-service_device.cpp。
- 到service_device.cpp文件底部可以看到接口的默认实现:
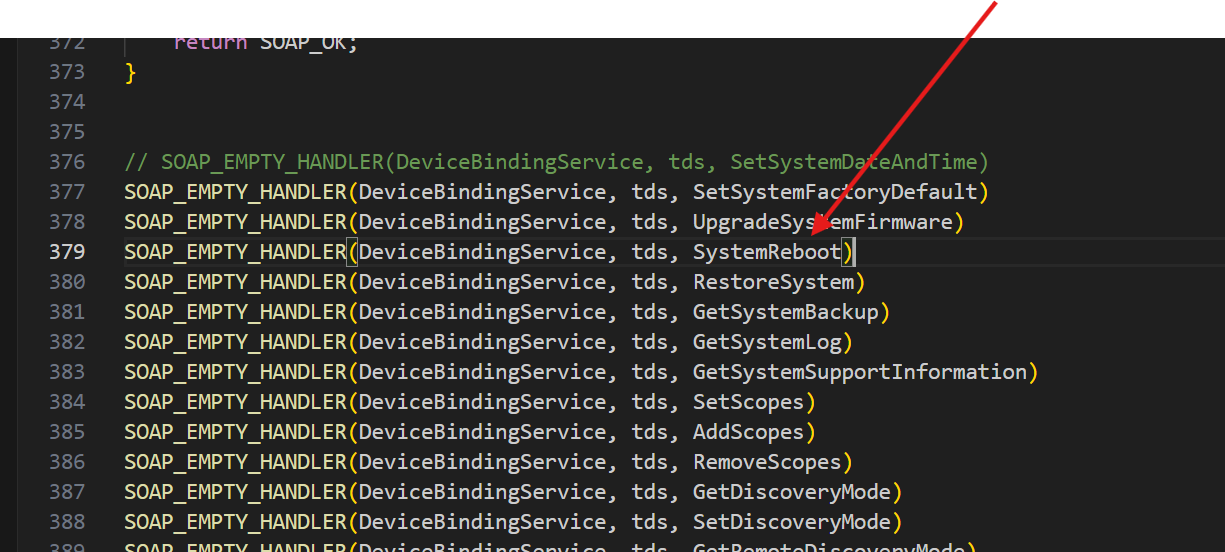
SOAP_EMPTY_HANDLER这个宏定义了接口默认实现,即什么都不干。查看onvif_srvd/build/generated下产生的soapDeviceBindingService.h,找到SystemReboot的签名,在service_device.cpp文件当中实现该接口。 - 如果你由仔细观察每个实现的接口,在函数最开头都会有一段形如ACCESS_CONTROL的鉴权的代码。在onvif当中,每一个接口都需要进行鉴权,不同的用户等级对接口有不同的访问权限。以我们即将添加的SystemReboot接口为例,参考文档:doc/ipcamera/ONVIF-Official-documents-master/网络接口规范/ONVIF-Core-Specification.pdf。
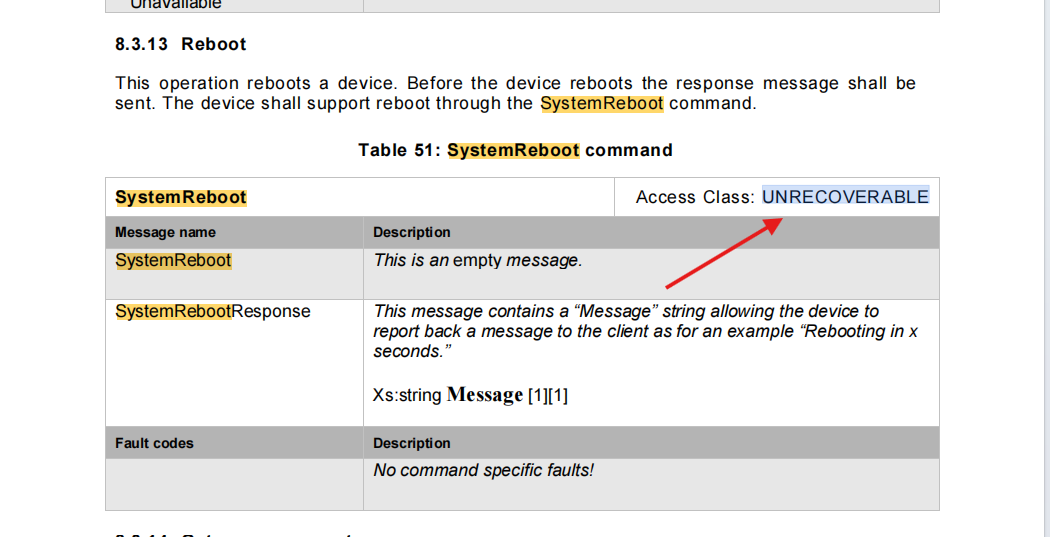
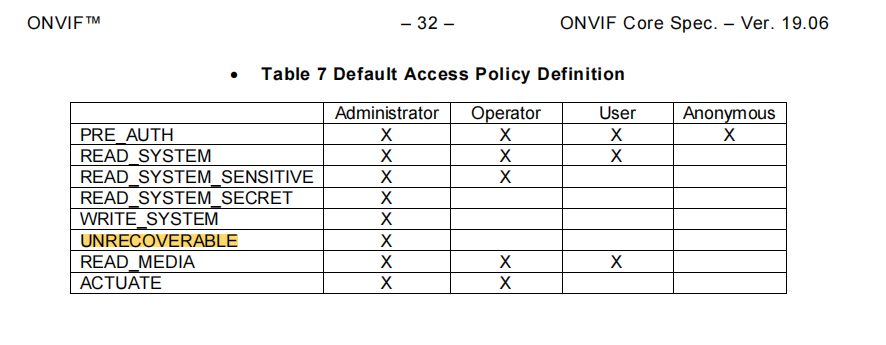
从文档当中,可以了解到,SystemReboot接口访问级别为UNRECOVERABLE,结合文档列出的权限表格得知,只有系统管理员才能调用接口重启系统:
 。
。 - 最终接口的实现可能如下:
1
2
3
4
5
6
7
8int DeviceBindingService::SystemReboot(_tds__SystemReboot *tds__SystemReboot, _tds__SystemRebootResponse &tds__SystemRebootResponse) {
DEBUG_MSG("Device: %s\n", __FUNCTION__);
ACCESS_CONTROL(soap, AccessClassesType::UNRECOVERABLE);
tds__SystemRebootResponse.Message = "ok!";
system("reboot");
return SOAP_OK;
}
